What do we need to build own Drone?
Drons are becoming popular day by day nowadays. If we need some drones we can find them in some stores, but what if they are not what we need ? In this article we are gonna talk about what we need to build our own drone.These parts are basic requirements of a drone to fly under our control. Here is the list:
Micro Processor
There is probably a million and a half reasons to go with any given micro-processor or micro-controller on the market, and quite frankly, the beaglebone black seems to be seldom used in quad copters. However it has some distinct advantages, especially for someone building a system with their own code.
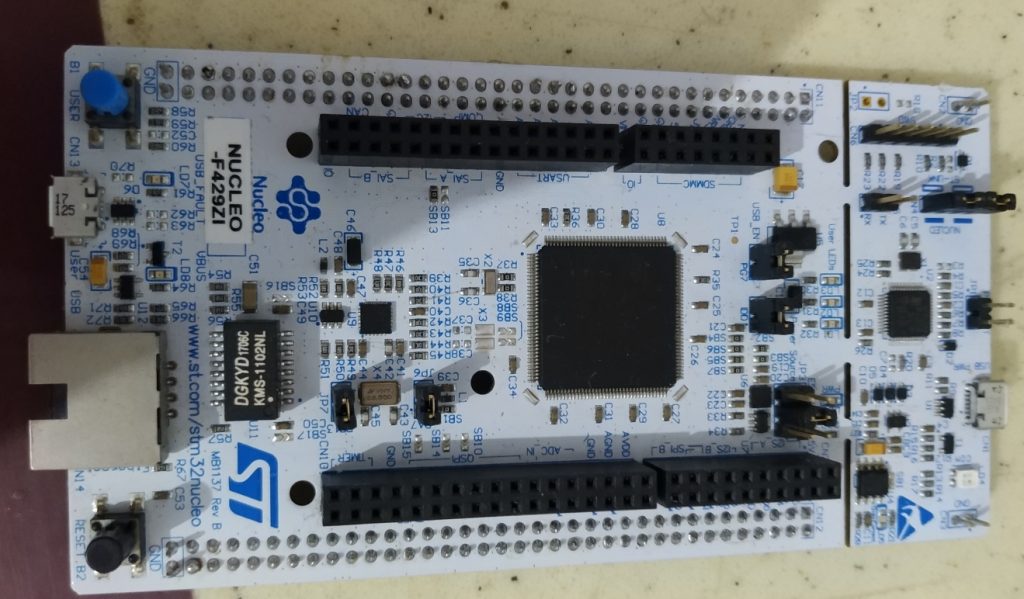
There are tonnes of micro processors on the market. Best micro processor is that one of you can program best. I can program NUCLEO-F429ZI produced by ST Electronics. Here is the some of properties of this processor :
- Core: Arm® 32-bit Cortex®-M4 CPU with FPU and crystal frequency up to 180 MHz
- Up to 2 MB of Flash memory and Up to 256+4 KB of SRAM including 64-KB of CCM (core coupled memory) data RAM
- Chrom-ART Accelerator™ for enhanced graphic content creation (DMA2D)
- Up to 168 I/O ports with interrupt capability (This one has 144 I/O pins)
- Up to 21 communication interfaces (I2C, UART, SPI, CAN)
- Price is around 30 USD
Inertial Measurement Unit (IMU)
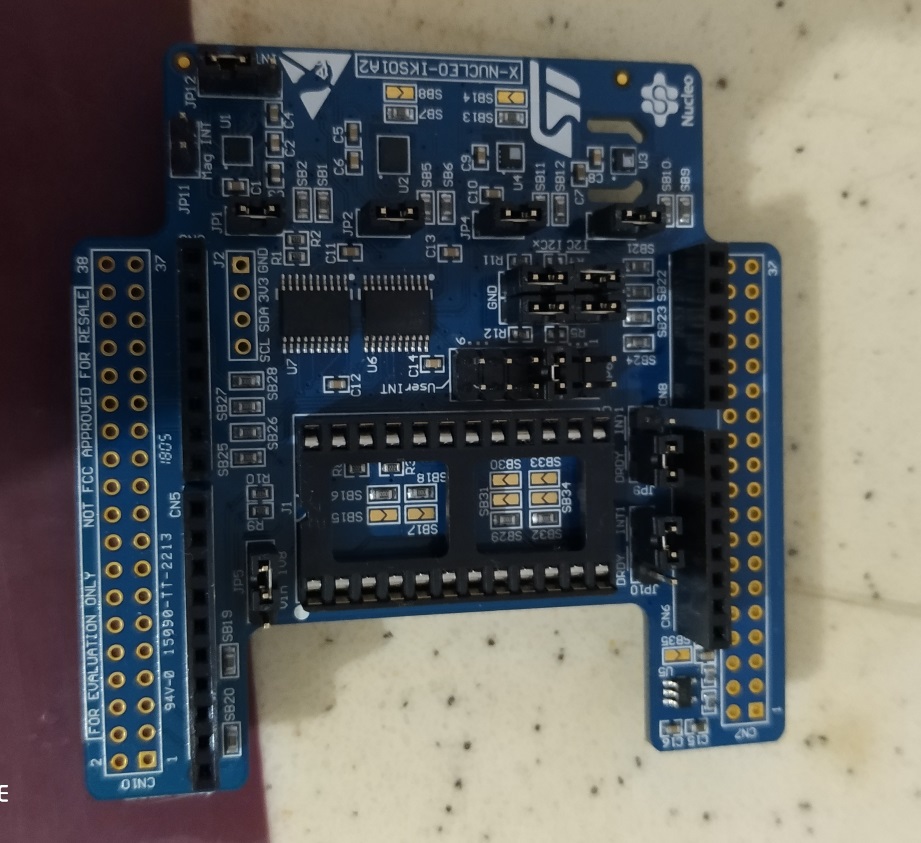
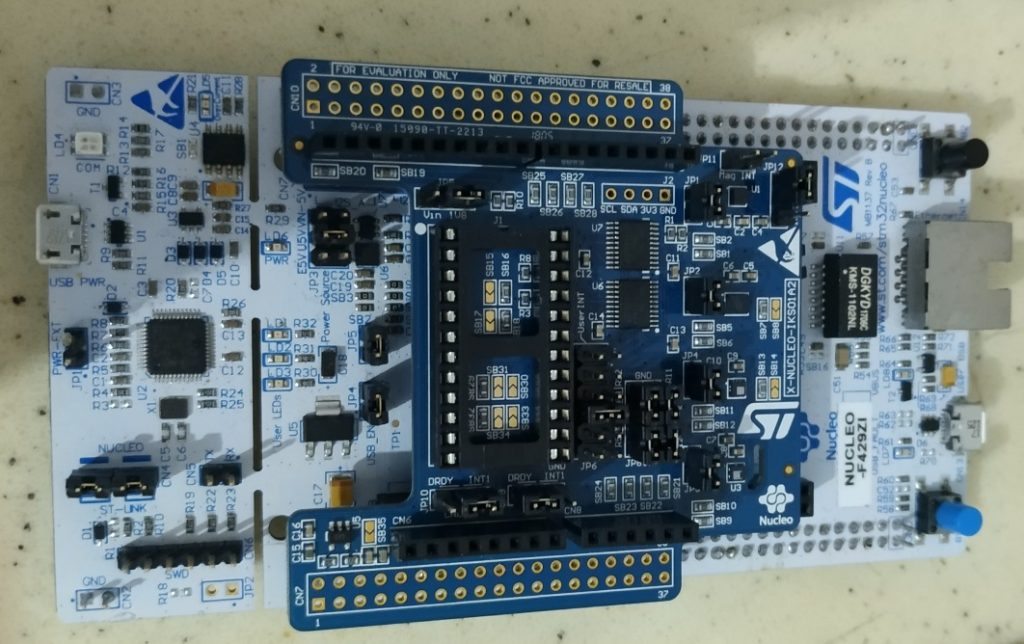
The X-NUCLEO-IKS01A2 is an inertial measurement unit device. This device contains 4 sensors. These sensors are :
- LSM6DSL : Accelerometer and Gyroscope
- LSM303AGR : Accelerometer and Magnetometer
- HTS221 : Humidity and Temperature
- LPS22HB : Barometric Pressure Sensor
All IMU’s have gyroscopes, accelerometers and magnetometer. Some of them have external sensores like humidty and temperature. If you want to fly a drone under control, you need these sensores. Processor will decide motors RPM values using this sensores datas. Some of them communicate with I2C or SPI. These communication algorithms generally use with these sensores. Setting RPM values depends on what you do with these sensores values. Cost of this part is around 25 USD.
Electronic Speed Controller (ESC)

Electronic speed controller is set the motor RPM values according to PWM value from microprocessor. Some of new technologies are using different communicating methods but oldest and reliable communicating method is PWM signal. ESC's have their own software to run motors. Motors are using high current values under constant voltage. Micro processor can not provide this energy directly but ESC's can. ESC's connected to power sources, motors and microprocessors. So their mission is drive motors using data from microprocessor's PWM signal and power from power source.
Brushless Motors

Motors are controlled by ESC's. With this energy motors will provide thrust force and drone gain vertical height. Generally motors are two types: in runners and out runners.
In- Runner Motors have power stators outside and runner magnets are inside.
Out runner motors have power stators inside and runner magnets are outside.
I have used outrunner motors. These motors have high torque at lower RPM value so they are ideal for drones. For calculating the values of motors we need to use motors KV value, battery voltage, RPM and propeller width.
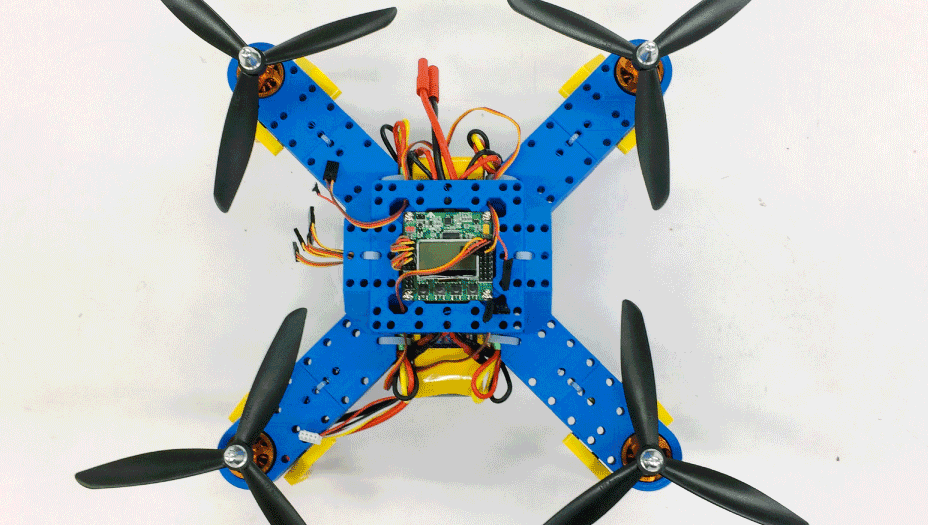
Rigid Drone Frame
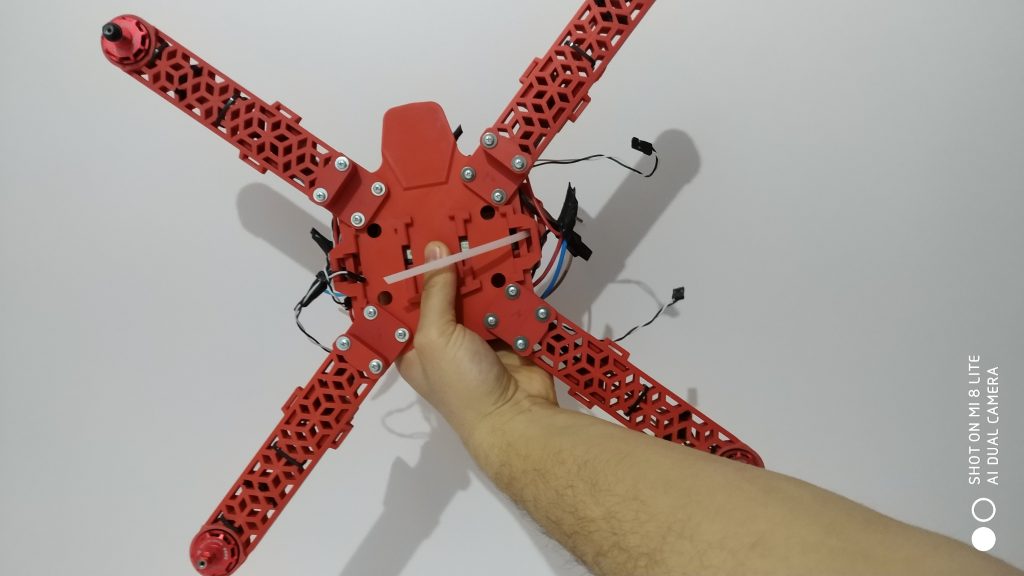
Drone fame must be rigid and symethrical. Rigidity will provide durability and stability. Motors, power units and all calculation units are mounted on this frame. Frame is keep them together and with provided thrust power drone will fly.
I have builded on Solid Works and printed it via 3D-Printer.
Remote Controller Device
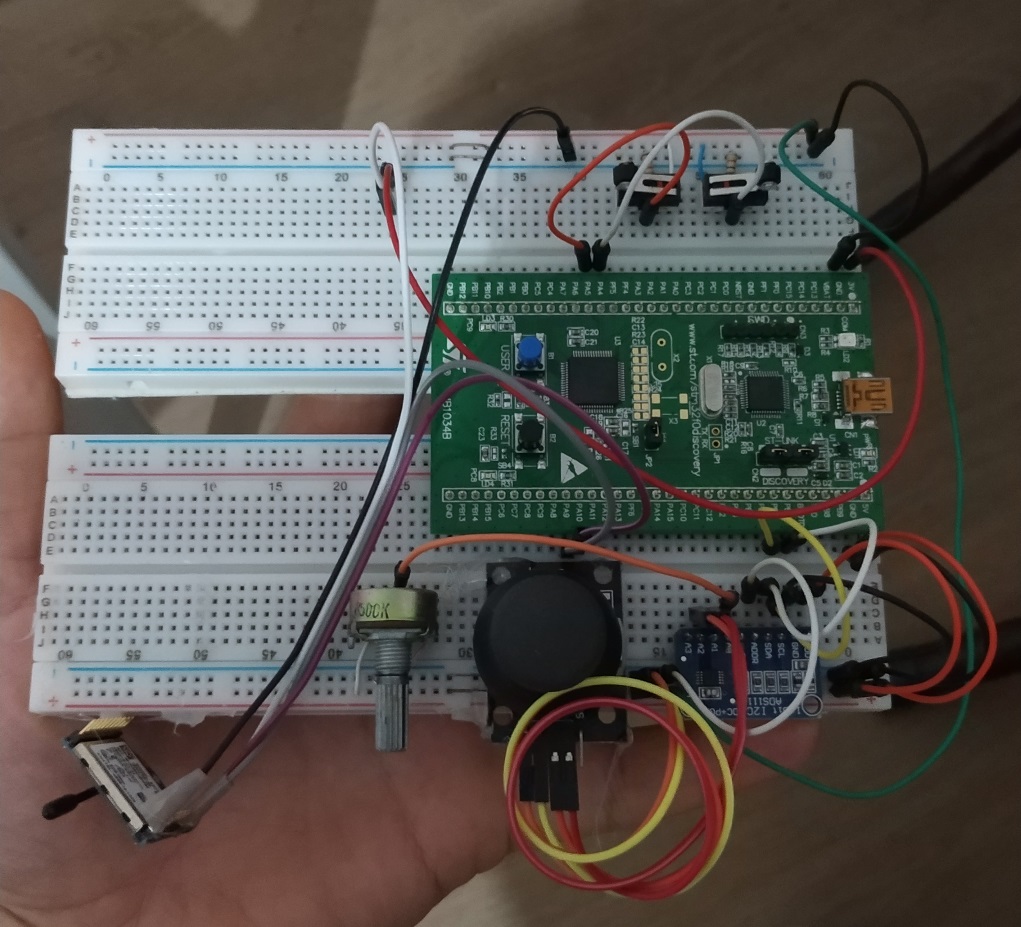
If you build a drone and want to fly it you can not connect with cable. So you need to use some wireless connection devices. Above image has my own remote controller device. I have bıilt this with XBEE S2C device. This device connect to microcontroller via UART communication method. This device can communicate around 2KM range and 2.4GHz frequency. We can transmit throttle, axis and current drone attitude datas. with this devices we can send datas and receives current status.
Batteries

Lipo batteries stands for Lithium-Polymer batteries. LiPo batteries are lightweight but has much power to run all motors on drone. while we are searching for ideal battery we will see 1S, 2S etc... voltage values. In here "S" stands for 3.7 VDC. In that case a 3S battery provides minimum 11.1 VDC voltage. We will see another value on them named mAH. This value stands for miliAmper per Hour. In that case 3300mAH battery provides 3.3 Amper per one our.
PAY Attention : If we do not charge these batteries below 3.8V per cell battery will be damaged and will not work again. So we must charge these batteries before emtied.
Propellers

Propellers have standart angle of attack and sizes. Propellers mounted on motors and with rotation it provides thrust force. Propellers have two different directions. These are CCW( Counter Clock Wise ) and CW( Clock Wise ). CCW propeller mounted on CCW motor and CW propeller mounted on CW motor. In theory all mass of drone is on these propellers Because propellers produce thrust force.
Good building your own drones.
Thank you.
Tags
Share this Post
Author

I am a software developer experienced 15 years and here to share all my programming experiences. I have worked on so many platforms and programming languages especially C, C#, C++ and Java. I am studing PhD at Kocaeli University on Aviation Technologies. I am building softwares and technologies on aviation.
Explanation of Proxy Design Pattern

Explanation of Strategy Design Pattern
Comments